楙廗夛 2017 戞1夞曬崘
- 擔帪:
- 2017擭5寧14擔(擔) 10:00乣15:30
- 僥儗僀儞:
- 旤乆杚栰 (愮嵨巗旤乆)
- 僐乕僗僙僢僞乕:
- 媨愳
- 嶲壛幰:
- 嶳嶈丄戝椦丄愳杮丄徏杮(棿)丄杮揷丄墫暯丄戝栰丄摗杮丄屆懞丄栘杮丄媑晲丄嶰懡丄敀婙丄揷拞丄憅抧丄旙岥丄愇嶳丄崱堜丄嶳壓丄惔悈 (宧徧棯)
- 儊僯儏乕:
- 僐儞僷僗偲曕應偵傛傞僗僺乕僪傾僢僾楙廗
 崱夞偼捠峴壜擻搙偺椙偄旤乆杚栰偺僥儗僀儞傪棙梡偟偰丄僐儞僷僗偲曕應偵傛傞抧恾撉傒偺徣棯傪楙廗偟傑偟偨丅抧恾傪尒傞夞悢傪尭傜偡偙偲偵傛傝儔儞僯儞僌僗僺乕僪偺掅壓傪杊偖偺偑栚揑偱偡丅
崱夞偼捠峴壜擻搙偺椙偄旤乆杚栰偺僥儗僀儞傪棙梡偟偰丄僐儞僷僗偲曕應偵傛傞抧恾撉傒偺徣棯傪楙廗偟傑偟偨丅抧恾傪尒傞夞悢傪尭傜偡偙偲偵傛傝儔儞僯儞僌僗僺乕僪偺掅壓傪杊偖偺偑栚揑偱偡丅
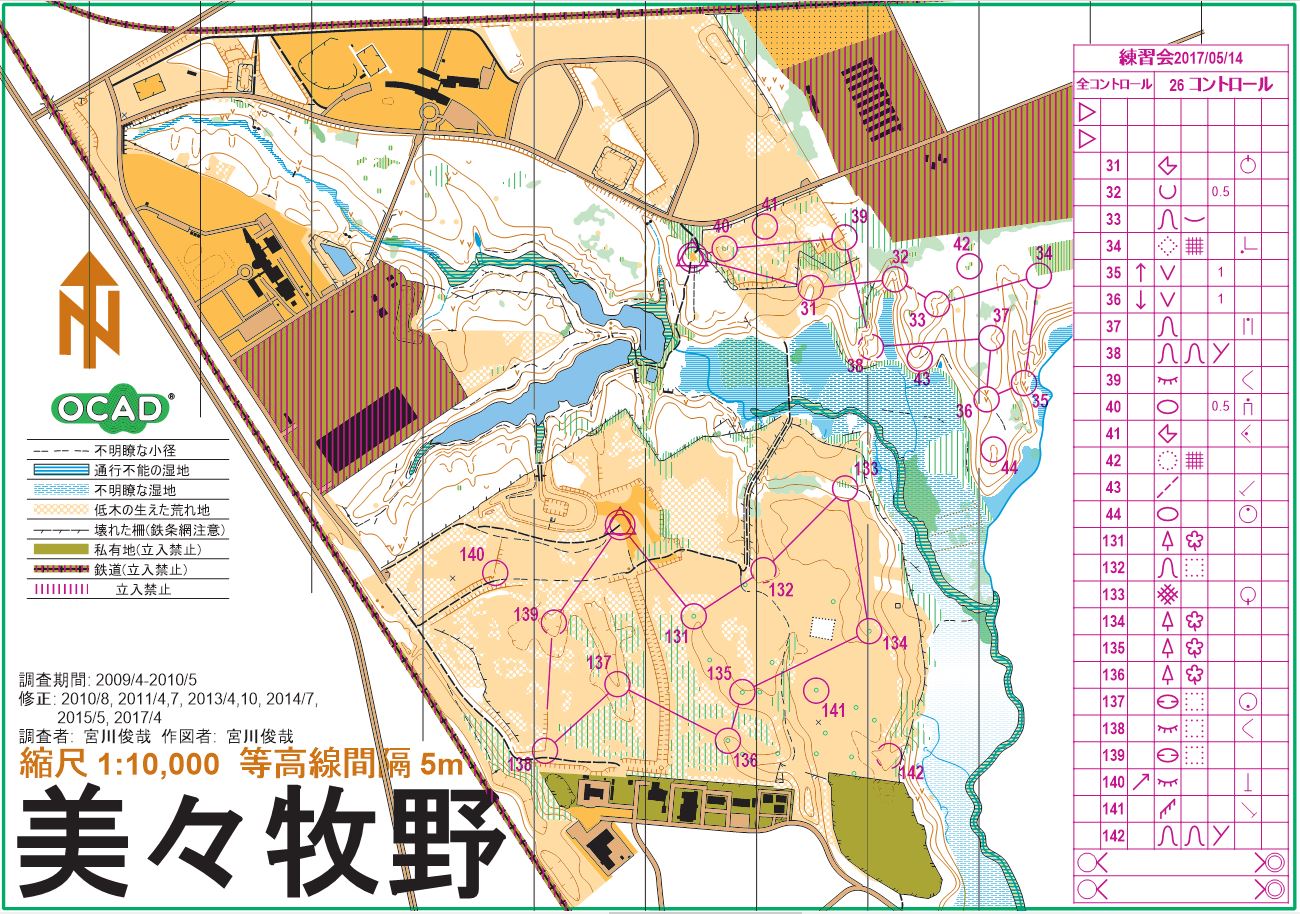
嵟弶偼僼儔僢僌偺傛偔尒偊傞僥儗僀儞撿晹偺杚憪抧懷偱丄屻敿偼杒晹偺怷偵堏摦偟偰幚巤偟傑偟偨丅巊梡偟偨抧恾傪塃偵帵偟傑偡丅
慡僐儞僩儘乕儖傪慄偱宷偄偱僐乕僗傪帵偟偰偄傑偡丅夢傝廔偊偨嶲壛幰偼梋暘偺僐儞僩儘乕儖傕巊偭偰奺帺偱僶儕僄乕僔儑儞儖乕僩傪寛傔偰憱偭偰傕傜偄傑偟偨丅
嵟弶偵儔儞僯儞僌僗僺乕僪偺掅壓傪杊偓丄弰峲懍搙傪堐帩偡傞偨傔偺僫價僎乕僔儑儞偵偮偄偰丄婔偮偐偺僐僣傪愢柧偟傑偟偨丅偦偟偰憱傝側偑傜楙廗偟偰傕傜偄傑偟偨丅埲壓偵偦偺梫揰傪帵偟傑偡丅
- 僆儕僄儞僥乕儕儞僌偺僫價僎乕僔儑儞
-
- 帩偭偰偄傞僗僺乕僪傪弌偟愗傞
- 乽抧恾撉傒乿(抧恾傊偺僐儞僞僋僩)偼乽弰峲懍搙乿偑掅壓偡傞
- 昁梫側抧恾撉傒 仺 儖乕僩僾儔儞僯儞僌
- 晄昁梫側抧恾撉傒
- 仺 僆乕僶乕儔儞偺晄埨 仺 曕應
- 仺 僾儔儞奜偺摿挜暔偺妋擣 仺 抁婜婰壇(曐尟)
- 仺 僐儞僩儘乕儖埵抲偺嵞妋擣 仺 僐儞僩儘乕儖埵抲偺僀儊乕僕
- 曕應偼乽弰峲懍搙乿傪堐帩偡傞偨傔偺媄弍
- 抁婜婰壇(僾儔儞奜偺摿挜暔)偲挿婜婰壇(僾儔儞僯儞僌丒埵抲愢柧)
- 僐儞僩儘乕儖埵抲偼乽僀儊乕僕乿偱婰壇偡傞(姷傟側偄偆偪偼僨僼婰崋偱僀儊乕僕)
- 僆儕僄儞僥乕儕儞僌偺僫價僎乕僔儑儞偱僇乕僫價偺僀儊乕僕偼幪偰傞
- 仺 揰(僠僃僢僋億僀儞僩)傪嫍棧(曕應)偲曽妏(僐儞僷僗)偱宷偖僀儊乕僕
弶斉:2017擭5寧19擔 嵟廔峏怴:2017擭5寧19擔